设计说明:
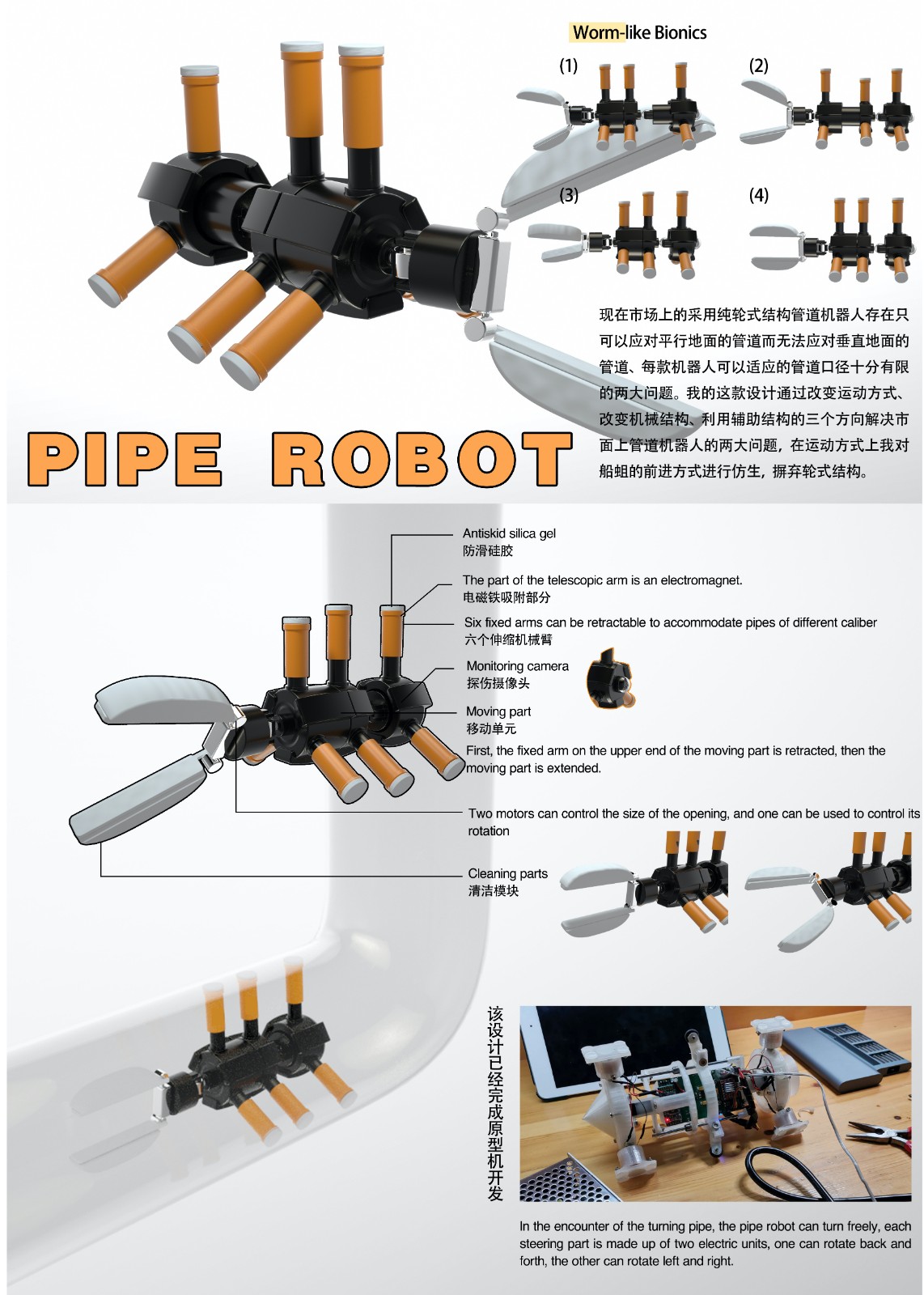
现在市场上的采用纯轮式结构管道机器人存在只可以应对平行地面的管道而无法应对垂直地面的管道、每款机器人可以适应的管道口径十分有限的两大问题。我的这款设计通过改变运动方式、改变机械结构、利用辅助结构的三个方向解决市面上管道机器人的两大问题,在运动方式上我对船蛆的前进方式进行仿生,摒弃轮式结构。模仿船蛆先收缩后舒张,在上腿固定的情况下收缩身体让下腿向上,以此循环往复的攀爬垂直木质结构的运动方式。因为结构的优化通过液压杆的作用,实现了根据不同直径的管道调节两伸缩臂位置的功能,便于该管道机器人适合不同直径的管道。在可磁化管道中电磁铁会开始工作,在其工作时会更加稳定的吸附在钢铁管道的内侧壁上,实现了更稳定防止管道机器人在钢铁管道内部打滑的功能。在非可磁化管道中,通过液压杆的作用,为管道机器人提供不同于轮式结构的可控的摩擦力,杜绝管道机器人在非金属管道内部出现打滑的情况。这款设计获得了实用新型专利。
 沪公网备案 31010402009707
沪公网备案 31010402009707